Координация крутящего момента системы обеспечивается модулем управления гибридной силовой передачей. Модуль управления двигателем (ЕСМ) обеспечивает взаимодействие педали акселератора, при котором водитель запрашивает крутящий момент автомобиля. Эти запросы водителя координируются и проверяются в модуле ЕСМ, и окончательный запрос крутящего момента направляются на модуль управления гибридным силовым агрегатом. Затем модуль управления гибридным силовым агрегатом определяет, как будет распределяться крутящий момент между двумя электродвигателями и двигателем. После определения распределения крутящего момента выполняются уменьшения крутящего момента, основанные на сбоях системы, указанных ниже:
•
Устойчивость автомобиля
•
Надежность крутящего момента
•
Защита компонента от перегрева
Рассмотренные значения распределяются на систему. Координация крутящего момента системы непосредственно зависит от состояния зарядки аккумуляторного блока высокого напряжения.
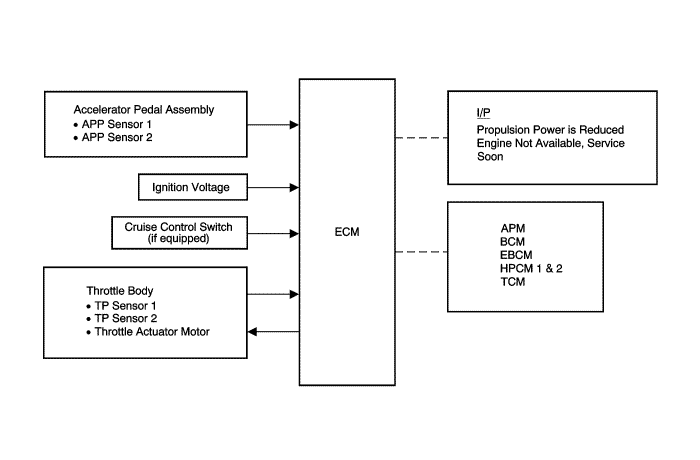
Эта система является системой с распределенным управлением, где крутящий момент системы регулируется по системной сети. Системная сеть состоит из обмена серийными данными между контроллерами. указанными ниже:
•
Модуль управления двигателем (ECM)
•
Модуль управления гибридным силовым агрегатом 1 и 2 (НРСМ 1 и 2)
•
Модуль управления коробкой передач (TCM)
•
Электронный модуль управления тормозной системой (EBCM)
•
Вспомогательный блок питания (АРМ)
Модуль управления гибридной трансмиссией определяет частоту вращения двигателя на основании состояния зарядки аккумуляторного блока высокого напряжения. Управление положением дроссельной заслонки осуществляется контроллером ЭСУД посредством широтно-импульсного модулированного сигнала напряжения на сервомотор привода дроссельной заслонки. Створка дроссельной заслонки подпружинена в обоих направлениях, в исходном положении она слегка приоткрыта.
Система tac может работать в одном из нескольких режимов (выполнять несколько функций), которые относятся к нормальным. Во время нормальной работы система может переходить в следующие режимы:
•
Минимальное значение педали -- при включении автомобиля модуль ECM обновляет минимальное значение педали, полученное в результате обучения системы.
•
Минимальные значения положения дроссельной заслонки -- при включении автомобиля модуль ECM обновляет минимальное значение положения дроссельной заслонки, полученное в результате обучения системы. Для "обучения" минимальному значению положения дроссельной заслонки ее перемещают в закрытое положение.
•
Режим антиобледенения -- Если дроссельная заслонка не способна достигнуть предварительно установленного положения, включается режим антиобледенения. В режиме взламывания льда контроллер ЭСУД несколько раз выдает сигнал с максимальной шириной импульсов на сервомотор привода дроссельной заслонки в направлении закрывания.
•
Режим экономии энергии аккумуляторной батареи -- Если после истечения заранее установленного периода времени значение частоты вращения двигателя в об/мин отсутствует, то модуль ECM выдает команду на включение режима экономии энергии аккумуляторной батареи. В режиме экономии зарядки аккумулятора модуль ЕСМ отключает цепи управления двигателем ТАС, чем устраняется расход тока на поддержание частоты вращения двигателя, а дроссельная заслонка возвращается в подпружиненное исходное положение.
Режим пониженной мощности
Когда модуль ЕСМ обнаруживает неисправность в системе tac, он может перевести систему в режим пониженной мощности двигательной установки. Режим пониженной мощности двигательной установки может стать причиной одного из следующих состояний:
•
Ограничение разгона - Модуль ECM продолжает использовать педаль акселератора для управления тяговым усилием, однако, разгон автомобиля ограничивается.
•
Режим ограничения дроссельной заслонки - Модуль ECM продолжает использовать педаль акселератора для управления тяговым усилием, однако, мощность двигательной установки ограничивается.
•
Режим исходного положения дроссельной заслонки -- Модуль ECM выключает двигатель привода дроссельной заслонки, и дроссельная заслонка возвращается в подпружиненное исходное положение.