2.3.9.17. Компенсация отказов датчика положения дроссельной заслонки
Датчик положения дроссельной заслонки включает две (главную дополнительную) цепи датчика. При неисправности в любой из цепей датчика электронный блок управления двигателя обнаруживает разницу в напряжениях сигнала в этих двух цепях, отключает ток к электродвигателю привода дроссельной заслонки и переходит на аварийный режим работы. Тогда, под действием силы возвратной пружины, дроссельная заслонка возвращается в заданное положение и остается в этом положении. В этом случае транспортное средство может осуществлять движение в аварийном режиме, а мощность двигателя регулируется посредством управления впрыском топлива и установкой угла опережения зажигания в соответствии с углом открытия акселератора.
Аналогичный алгоритм управления используется, если электронный блок управления двигателя обнаруживает неисправность в системе электродвигателя привода дроссельной заслонки.
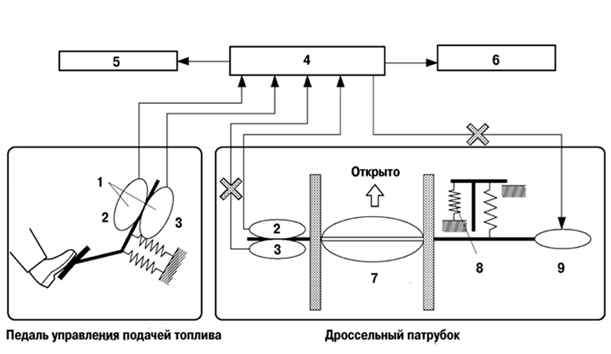 |
Рис. 2.220. Режим компенсации отказов датчика положения дроссельной заслонки: 1 – датчик положения педали управления подачей топлива; 2 – главный; 3 – дополнительный; 4 – электронный блок управления двигателем; 5 – топливные форсунки; 6 – катушка зажигани
|